Multi-task multi-sensor fusion for 3d object detection
Abstract
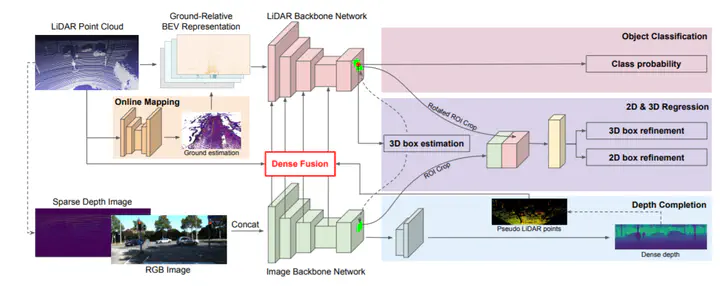
[CVPR 2019] In this paper we propose to exploit multiple related tasks for accurate multi-sensor 3D object detection. Towards this goal we present an end-to-end learnable architecture that reasons about 2D and 3D object detection as well as ground estimation and depth completion. Our experiments show that all these tasks are complementary and help the network learn better representations by fusing information at various levels. Importantly, our approach leads the KITTI benchmark on 2D, 3D and bird’s eye view object detection, while being real-time
Type
Publication
In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2019)