GeoSim: Realistic Video Simulation via Geometry-Aware Composition for Self-Driving
GeoSim is nominated as a best paper candidate in CVPR
Overview Video
Youtube or Bilibili. You may also download it using this link
Abstract
We present GeoSim, a geometry-guided simulation procedure to insert dynamic objects into videos with greater realism. It helps enable scalable sensor simulation for training and testing autonomy systems, as well as applications like AR, VR, and video editing. We first create 3D assets from real-world data and then use the proposed simulation pipeline to realistically composite 3D assets into existing camera imagery.
3D asset reconstruction
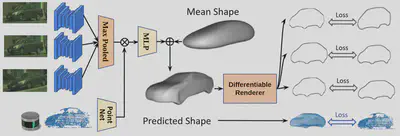
We propose a self-supervision model to automatically build vehicle asset bank from the wild without 3D groundtruth.
- Multi-sensor feature is extracted from camera and LiDAR.
- Per-vertex deformation is applied on a learnable mean-shape to predict shape.
- Silhouette is differentiably rendered from the predicted mesh and compared with the labels. LiDAR consisteny is also applied
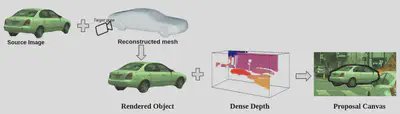
Using the reconstructed 3D mesh, we can perform novel view warping of the source image to new target poses.
We build a large and diverse asset bank for simulation with over 8 000 unique vehicles.



Simulation Pipeline
GeoSim leverages the asset library to insert actors and simulate new images.
-
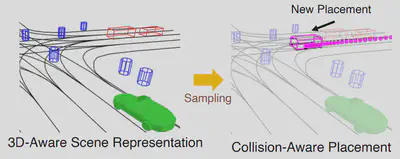
Step 1: Scenario Generation We first automatically generate a plausible placement and trajectory that complies with the existing traffic. An asset with a similar viewpoint is selected for rendering.
Automatic scenario generation -
Step 2: Occlussion-aware rendering We render the selected asset at a new target pose. We account for occlusion by using dense depth from a pre-trained depth completion network. Additionally, we render a soft-shadow corresponding to the selected 3D asset considering a cloudy HDRI as the environement map..
Occlussion-aware rendering -
Step 3: Post composition: Finally, we perform post-image composition. We use a synthesis network to handle inconsistent illumination and inpaint the discrepancies at the boundary, so that the vehicle is composited into the image seamlessly.
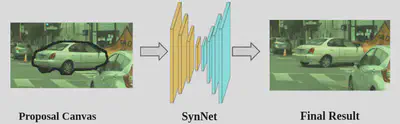
Post-image composition
Qualitative Results
Video results in 4K resolution (4096x2160)


Citation
@inproceedings{chen2021geosim,
title={GeoSim: Realistic Video Simulation via Geometry-Aware Composition for Self-Driving},
author={Yun Chen, Frieda Rong, Shivam Duggal, Shenlong Wang, Xinchen Yan, Sivabalan Manivasagam, Shangjie Xue, Ersin Yumer, Raquel Urtasun},
year={2021},
booktitle={CVPR},
}